

Hay situaciones en las que el nivel de una señal de audio es variable e impredecible. Para evitar tener que jugar manualmente con la ganacia (el volumen), de un amplificador, conviene disponer de una etapa CAG o ACG (Control Automático de Ganancia).
Si bien se pueden usar circuitos integrados especializados, como el MAX9814, en esta ocasión y como un repaso de diseño de circuitos, implementaremos un CAG, usando componentes discretos, un amplificador operacional y un amplificador controlado por voltaje.
El Amplificador Controlado por Voltaje
Un circuito con CAG se construye teniendo alguna forma de controlar la ganancia de señal, de un amplificador, para poder variarla de acuerdo al nivel de señal obtenido. Por lo tanto lo primero que se requiere para poder implementar un CAG, es un amplificador con control de ganancia por voltaje, o por corriente, aunque la variación no sea lineal, ya que en el peor de los casos solo afectará en la forma en que la señal es atenuada o amplificada.
Para el diseño de esta etapa se pueden ensayar varias soluciones. Una de ellas puede ser la que usa operacionales, y transistores para variar la ganancia por medio de variación de la corriente de base. Algunas de las configuraciones que se pueden plantear son: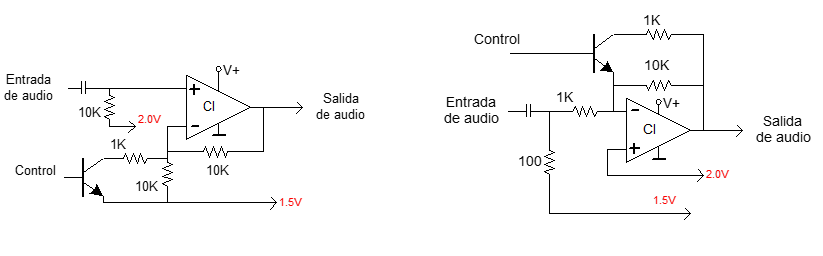
En ambas se trata de hacer trabajar al transistor en zona de conducción, y ajustando la excursión de salida para obtener niveles apreciables. La variación en la polarización del transistor debe producir una variación en la impedancia colector-emisor, y también como efecto secundario desplazan el punto de polarización de la salida del operacional. Sin embargo aunque se logra control de ganancia ambos casos, se tiene el problema de la falta de linealidad en la señal.
Es posible también usar transistores FET para implementar soluciones similares.
Sin embargo, para simplificar el diseño, aquí usaremos al Circuito Integrado AN5262 como amplificador de ganancia controlada por voltaje.
El AN5262
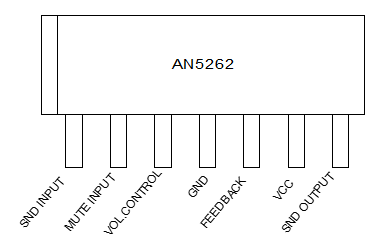
Este circuito integrado es un pre-amplificador de volumen para TV, con control por voltaje . El voltaje típico de alimentación es 10V, y su encapsulado es SIP de 7 pines.
Extrañamente no existe demasiada información técnica sobre este CI [1], a pesar de que se trata de un elemento bastante conocido y fácil de adquirir en el mercado local. Afortunadamente la mayoría de entradas y salidas son obvias. Tan sólo la entrada de realimentación ofrece cierta duda. Sin embargo siguiendo las configuraciones típicas de circuitos con entrada de realimentación se puede deducir como es la conexión básica.
El sonido ingresa por el terminal SND INPUT. El terminal MUTE INPUT se activa en alta. Por defecto se encuentra en baja y sirve para anular la salida de audio que corresponde al terminal SND OUTPUT. VOLUME CONTROL sirve para regular el nivel de salida de audio, y se controla desde 0 hasta VCC. El control no es lineal, FEEDBACK es la entrada de realimentación y se debe conectar en un lazo cerrado tomando una fracción de la salida para permitir flexibilizar la ganancia total del sistema.
La mayoría de parámetros que se dan aquí provienen de ensayos y no de las hojas técnicas que no estuvieron a disposición hasta el momento de escribir este documento.
Una prueba sencilla demuestra que la impedancia de entrada es de 13K aproximadamente a 1KHz, realizando el ensayo de caída de señal. El nivel de salida es máximo cuando el terminal de control de volumen llega al voltaje de alimentación y parece comenzar a actuar desde cero. El control no es lineal sino más bien parece logarítmico.
La configuración básica se muestra en el diagrama:
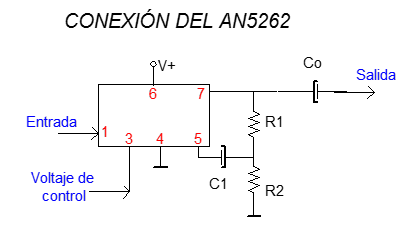
El terminal de realimentación toma una fracción de la señal para introducirla de nuevo en el circuito. Se trata de una entrada bastante sensible, inclusive a RF, así que las conexiones deben ser cortas alrededor de este terminal, y los condensadores de filtro dieron problemas en los ensayos.
La capacidad de carga no es muy alta, a 10K el chip no se esfuerza demasiado pero existe una caida de señal de 1.5% aprox. A 1K de carga la señal de salida cae en un 15% aprox. de donde se deduce que la impedancia de salida debe estar en 130 ohmios aproximadamente. Pero a 1K de carga, el rango dinámico de salida sin distorsión se reduce a sólo 0.9Vp-p.
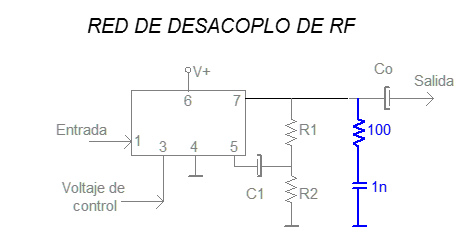
Es notoria la cantidad de RF que suele aparecer a la salida. Es conveniente insertar una red de desacoplo en RF a la salida. La red que mejor se comportó experimentalmente fue la de 100 ohmios en serie con 1nF. Valores mayores de capacidad disminuyen el ancho de banda, produciendo distorsión en las frecuencias altas, y valores menores no filtran lo suficiente la RF. El valor elegido es un buen compromiso pero está en un punto que puede considerarse cerca de un estado crítico.
Una configuración para ganancia unidad, es poco ortodoxa y es la que se muestra en el diagrama:
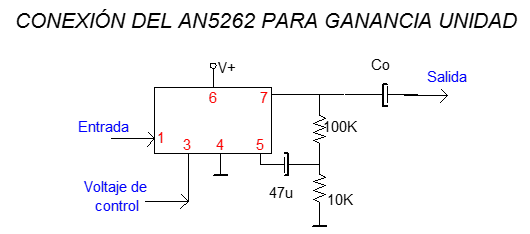
Este circuito puede considerarse como un atenuador, ya que su ganancia máxima va a ser la unidad, la fórmula de ganancia puede intuirse aunque no me atrevo a afirmar la validez de la tal fórmula ya que no la he verificado para muchos valores. Lo que interesa aquí es el rango dinámico de la salida sin distorsión que debe ser igual al rango dinámico de la entrada[4] y que fue medido en 4 Vp-p. La distorsión armónica que aparece en la salida es bastante grave cuando se supera ese valor. Además hay que tener en cuenta que ese valor específico de rango dinámico corresponde al AN5262 cuando está alimentado con 13 voltios. A 12 voltios cae a 3Vpp, y a 11 V el rango dinámico está en 2.8Vp-p.
Se puede obtener un rango dinámico mayor a la salida, si por ejemplo se configura una ganancia de 2 cambiando R2 de 10K a 5K. En esta situación se midió un rango dinámico de 6Vp-p a la salida, por lo tanto la entrada sólo deberá variar hasta 3Vp-p. Estos rangos de salida se midieron sin carga, con el voltaje de control al máximo y con alimentación de 13 voltios, en condiciones de carga la situación puede cambiar dramáticamente.
El consumo del AN5262 a 12 voltios es de 15 mA, que es relativamente alto para un circuito que sólo procesa señal. La disipación está en casi 200mW lo que produce un calentamiento apreciable. Se debería considerar alimentarlo a menor voltaje si se quiere alargar la vida de este chip.
Diagrama de Bloques
Casi todos los circuitos CAG, tienen el mismo esquema de diagrama de bloques:
Tal y como se muestra el diagrama es un típico sistema de control de lazo cerrado con realimentación negativa y con control Integral. La realimentación negativa se logra con el Inversor, mientras que el retardo es la parte integradora y necesaria para obtener mejor estabilidad y respuesta.
El conversor de señal a voltaje se implementa normalmente como un rectificador con filtro. El filtro en sí constituye un retardo, que aunque puede minimizarse lo suficientemente, no siempre se hace, sino que se aprovecha este retardo como parte (o todo) del retardo total que se requiere.
El retardo se implementa con filtros RC, que corresponden a circuitos integradores, y determinan la respuesta transitoria. Los retardos más precisos pueden requerir de sistemas de almacenamiento y temporizadores monoestables pero no es usual llegar a tal grado de complejidad, al menos en la mayoría de aplicaciones. Estos retardos son bien conocidos y usados en sistemas de procesamiento digital de señales[2] como parte de filtros digitales.
El amplificador en el lazo sirve para proporcionar la ganancia necesaria para optimizar el comportamiento deseado, afectando a la función de transferencia total del sistema.
El amplificador de adaptación solamente adapta los niveles de salida a los que se requiera para la aplicación específica con la que se está trabajando.
Funcionamiento
En condiciones normales, cuando no se introduce señal, el amplificador controlado en voltaje tampoco producirá señal a su salida (independientemente del voltaje de control), por lo tanto también a la salida del conversor de señal a voltaje apareceré un nivel bajo. Que aún amplificado debe ser bajo a la salida del amplificador del lazo. El inversor detecta un nivel bajo por lo que produce un nivel alto de voltaje de control, que es el que entra (después de un retardo) al amplificador que estará entonces trabajando con máxima ganancia.
Cuando los niveles de señales a la entrada sean demasiado alto, entonces se produce lo contrario de la condición anterior lo que obligará al amplificador a bajar su ganancia produciendo una atenuación y restableciéndose al punto de equilibrio que debe ser una posición intermedia en la que la ganancia estable[3] sea un valor fijo siempre que el nivel de entrada de señal sea también fija.
Las implementaciones prácticas no tienen una función de transferencia sencilla sino que se les aproxima por la más generosa, el análisis, por lo tanto, resulta a veces tedioso, así que se toma un modelo de aproximación tosca y luego por verificación práctica se puede ajustar a los parámetros requeridos. También se suele trabajar con fórmulas empíricas. El circuito que presentaré en el siguiente artículo, por ejemplo no es fácil de representar dado que incluye muchas no-linealidades en el lazo de realimentación pero es fácilmente configurable haciendo un análisis bastante simple y aproximado.
[1] Este diseño se realizó en el año 2000, en donde no existía tanta información en la Web como ahora.
[2] La representación digital de los circuitos de retardo retardos analógicos puede ser a veces demasiado complicado en el plano discreto, prefiriéndose aquellos que trabajan mejor en ese dominio. Analógicamente no se tiene tanta flexibilidad pero se puede aprovechar la simplicidad.
[3] Se habla de ganancia estable debido la ganancia tarda un tiempo en equilibrarse, esto es lo que se llama el tiempo de establecimiento y depende de varios parámetros pero principalmente del bloque de retardo.
[4] O mejor dicho nivel máximo de señal que admite la entrada sin generar distorsión.. Por Rango Dinámico entendemos al valor máximo de señal que se puede producir en un circuito sin generar distorsión.
![]() ¿Cómo citar este artículo?
¿Cómo citar este artículo?
- En APA: Hinostroza, T. (29 de marzo de 2018). Diseño de un Control Automático de Ganancia – Parte 1. Blog de Tito. https://blogdetito.com/2018/03/29/diseno-de-un-control-automatico-de-ganancia-parte-1/
- En IEEE: T. Hinostroza. (2018, marzo 29). Diseño de un Control Automático de Ganancia – Parte 1. Blog de Tito. [Online]. Available: https://blogdetito.com/2018/03/29/diseno-de-un-control-automatico-de-ganancia-parte-1/
- En ICONTEC: HINOSTROZA, Tito. Diseño de un Control Automático de Ganancia – Parte 1 [blog]. Blog de Tito. Lima Perú. 29 de marzo de 2018. Disponible en: https://blogdetito.com/2018/03/29/diseno-de-un-control-automatico-de-ganancia-parte-1/
Excelente descripción. Ya puestos, podría hacer otra página más con componentes mas asequibles. Los dos circuitos que salen al principio de su página sería un buen punto de partida.
Voy a considerarlo para un próximo artículo.