

En el artículo anterior vimos el fundamento de un sistema clásico de Control Automático de Ganancia, y describimos el integrado An5262.
En este artículo finalizamos con el diagrama final y las explicaciones de cada bloque.
El Diagrama
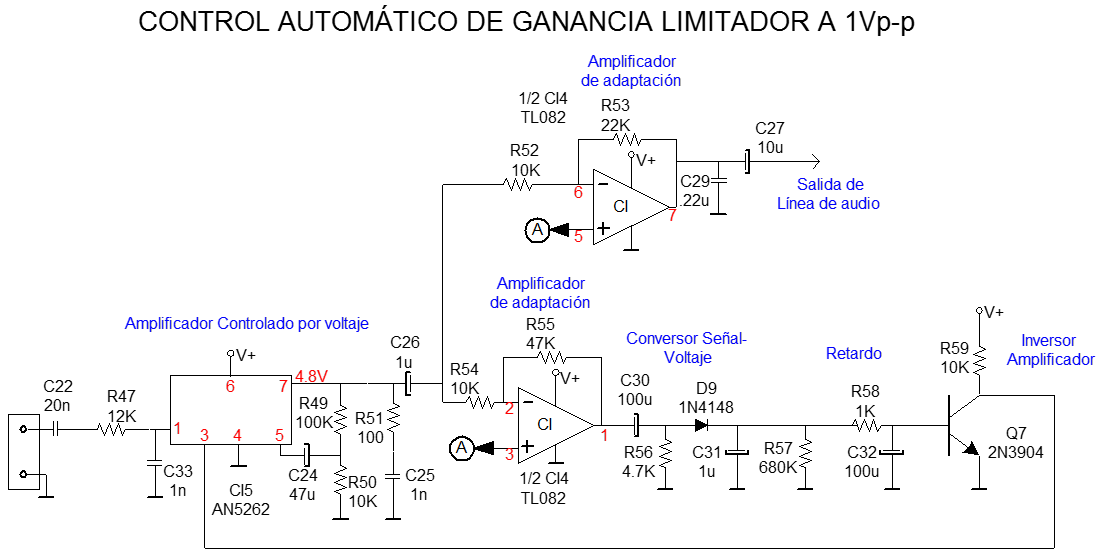
El punto A es un punto de alimentación auxiliar que es la mitad de la alimentación principal, que en este caso, asumimos será de 12V.
Este circuito sería un amplificador de ganancia unidad, con CAG, en modo de atenuación, es decir que si la señal de entrada está en el rango de 1Vp-p o menos, no se aplicará cambio en la señal. Pero si la señal de entrada supera en umbral de 1Vp-p, se empezará a aplicar atenuación.
Visto en diagrama de bloques el circuito sería:
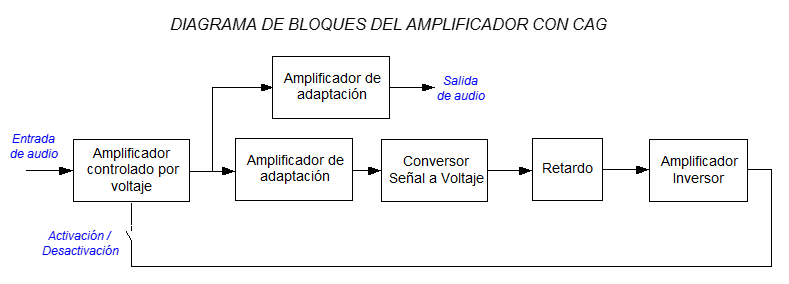
En este diagrama se pudo inclusive agregar otro bloque, el comparador, que estaría antes del Amplificador Inversor, pero como está implícito en el funcionamiento del elemento activo (Q7) no lo voy a incluir.
El planteamiento inicial del CAG era el de un limitador de señal, es decir que a partir de cierto nivel se produciría la atenuación que debería mantener constante el nivel de salida. Este nivel se fijó a 1Vp-p que afortunadamente se obtiene sin problemas con un par de operacionales adicionales.
Rango dinámico de entrada
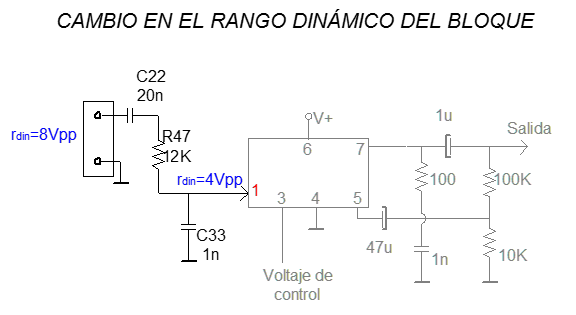
Primero se debería fijar el rango dinámico con la que se debería trabajar en la entrada del AN5262, que no tienen por que corresponder con el rango dinámico de todo el bloque. Esto tiene que ver con la resistencia de entrada R47 que es quien limita la corriente de la señal de entrada que, asumimos, tiene una impedancia baja y puede considerarse como una fuente de señal ideal.
Para disminuir la posibilidad de distorsión se consideró necesario atenuar la señal por al menos un factor de 2, entonces R47 en serie debería tener un valor de 13 K, (se tomó 12K para hacerlo más comercial). Entonces si se trabajaba con ganancia unidad, el rango dinámico de entrada del bloque aumentaría a 8Vp-p[1].
Con el rango de entrada ampliado, tenemos ahora que conseguir el voltaje de control para estabilizar el nivel. Primero vamos a determinar la ganancia necesaria del primer amplificador de adaptación (ver diagrama de bloques) de donde se sacará la salida de audio. Como asumiremos que el valor de entrada máximo (que entra por R47) estará en 1Vp-p y la ganancia a ese valor (que también es máxima) será 1, entonces considerando la atenuación de R47, obtendremos a la salida del AN5262 0.5Vp-p, por lo tanto el factor de amplificación de este primer amplificador de adaptación debe ser de 2 como se observa en el diagrama. De esa forma aseguramos obtener niveles de salida de audio en 1Vp-p (cuando el CAG está activado) que es la que necesitamos para sacarla por la salida de audio y que normalmente será enviada a una etapa de salida. Aquí encontramos otro filtro de RF, C29 de .22u que se incluyó al detectarse residuos de RF que alcanzaban al amplificador de audio.
Filtro de audio a la entrada
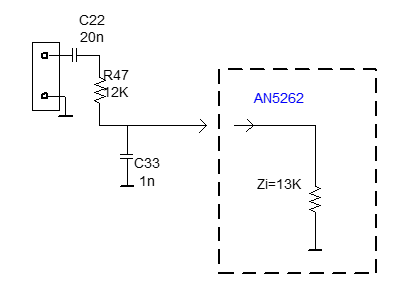
La entrada de audio pasa por la red C22, R47 y C33, antes de llegar al AN5262. Esta red constituye un filtro pasa banda, adaptado para trabajar en la banda de audio.
El primer filtro es un pasa altos, se forma con C22, R47 y la impedancia de entrada del AN5262, lo que da una frecuencia de corte superior aproximada de 320 Hz, a esa frecuencia se está despreciando el efecto de C33 que forma parte del pasa bajos «integrado» conjuntamente con la impedancia de entrada del AN5262 y R47. La frecuencia de corte de este pasa bajos está por encima de la banda audible y es sólo para filtrar las posibles interferencias de radio que pueden provenir de la entrada de audio.
Si bien la frecuencia de corte está un poco alta para la banda de audio, se debe considerar que se trata de un filtro de primer orden, y el efecto de la atenuación no es tan notorio para 200 Hz o hasta 100Hz.
De todas formas se puede variar fácilmente la frecuencia de corte inferior del pasa altos, variando simplemente C22, pero considerar que si se dejan pasar las frecuencias bajas de audio (en voz o música), serán estas las que determinarán el efecto del CAG, por ser las de mayor amplitud en voltaje.
Notar que para definir los parámetros del filtro, jugamos con valores de condensadores, ya que el valor de R47 se ha usado para fijar el rango dinámico a la entrada del amplificador.
Lazo de realimentación del CAG
La salida del AN5262 es enviada también a otro otro amplificador de adaptación para conseguir los niveles necesarios que requiere el conversor señal – voltaje.
Para simplificar el sistema usamos un simple rectificador de media onda, a modo de detector con filtro. Y como comparador y amplificador inversor usaremos un transistor NPN en clase C (Q7), el retardo lo implementamos con un simple RC (R58 y C32).
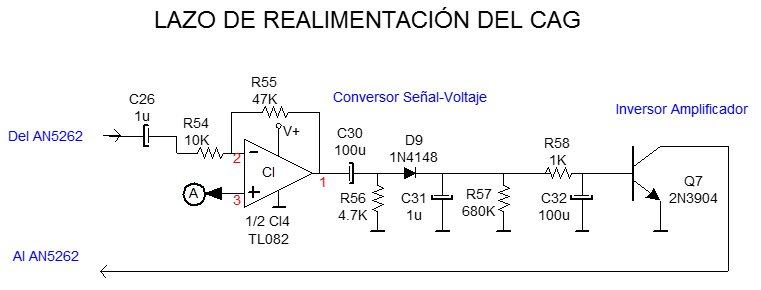 El nivel necesario de señal a partir del cual entrará a conducir el transistor se obtiene considerando el voltaje Vbe de conducción del transistor (0.6V) y el voltaje de conducción del diodo (0.6V)[2]. Como en el periodo estable estos voltajes se encuentran en serie, entonces a la salida del operacional se requiere un voltaje de pico positivo de 1.2 voltios. Otra forma de ver este resultado es considerando que se requiere un voltaje de 0.6 aproximadamente a la salida del diodo pero como este produce una caída de 0.6V cuando conduce (a pequeña señal) entonces el voltaje necesario a la entrada del rectificador es de 1.2V de pico positivo, que equivale a 2.4Vp-p. Ahora bien sabemos que la salida del AN5262 debe permanecer en 0.5 Vp-p ya que está configurado con ganancia unidad, entonces la ganancia debe ser aproximadamente 4.8. Para fines de valores comerciales hemos elegido 4.7 como factor de ganancia. Se eligió 10K como la impedancia de entrada de los 2 amplificadores de adaptación como compromiso entre carga e inmunidad al ruido.
El nivel necesario de señal a partir del cual entrará a conducir el transistor se obtiene considerando el voltaje Vbe de conducción del transistor (0.6V) y el voltaje de conducción del diodo (0.6V)[2]. Como en el periodo estable estos voltajes se encuentran en serie, entonces a la salida del operacional se requiere un voltaje de pico positivo de 1.2 voltios. Otra forma de ver este resultado es considerando que se requiere un voltaje de 0.6 aproximadamente a la salida del diodo pero como este produce una caída de 0.6V cuando conduce (a pequeña señal) entonces el voltaje necesario a la entrada del rectificador es de 1.2V de pico positivo, que equivale a 2.4Vp-p. Ahora bien sabemos que la salida del AN5262 debe permanecer en 0.5 Vp-p ya que está configurado con ganancia unidad, entonces la ganancia debe ser aproximadamente 4.8. Para fines de valores comerciales hemos elegido 4.7 como factor de ganancia. Se eligió 10K como la impedancia de entrada de los 2 amplificadores de adaptación como compromiso entre carga e inmunidad al ruido.
Retardo y Amplificador Inversor
El retardo se implementa con el pasa bajos R58-C32, que se puede considerar como un integrador pasivo, es por eso que este tipo de control tiene característica proporcional-integral. La parte proporcional corresponde a los amplificadores en el lazo de realimentación. Se puede hacer una estimación para calcular el tiempo de retardo. Partimos de que la impedancia de salida del operacional es baja y en conjunción con el filtrado de C31, la señal de control presenta impedancia lo suficientemente baja como para poder despreciarla con respecto a la del filtro R58-C32. Si la señal de entrada alcanza instantáneamente los 2 Vp-p, entonces podemos modelar la configuración como muestra el diagrama:
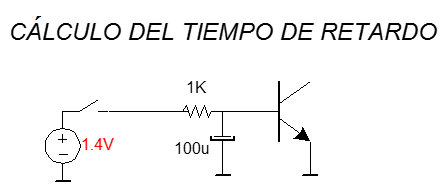
Despreciando el tiempo de respuesta del rectificador[3] (asumimos señal sinusoidal), entonces a la salida del rectificador (conversor señal – voltaje), se tendría 1.4 voltios. La fórmula de carga es exponencial con constante RC de 0.1, y cortándola en 0.6 voltios obtenemos un tiempo de casi 60 mseg, un tiempo bastante corto a nivel macro pero es significativo en algunas aplicaciones[4]. Como en este cálculo hemos considerado una señal de 2 Vp-p, se puede deducir que señales de mayor amplitud tendrán un tiempo de retardo menor, y viceversa.
El transistor al responder amplifica la señal de control, siempre que supere el voltaje de conducción. El tiempo de respuesta del transistor es despreciable así que no se considera en el retardo del lazo. El transistor usado es el común 2N3904, la ganancia no es crítica pero las que se usaron en los prototipos estaban cerca de 100, si bien deberían ser un poco más altas.
Como el transistor no conduce hasta que no se supere el nivel umbral, se puede entonces considerar como un comparador. El nivel de comparación es precisamente este nivel umbral, y la salida no es la diferencia entre niveles, sino que es una función más complicada, con tendencia exponencial. Se puede considerar entonces a Q7 como amplificador de error, y el error vendría a ser la diferencia entre el umbral y el voltaje de entrada que viene del conversor señal – voltaje. La configuración de inversor es necesario para conseguir la realimentación negativa y asegurar la estabilidad del sistema.
Ganancia del amplificador
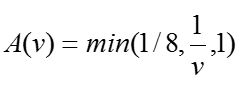
Hay que considerar que el comportamiento de este amplificador cuando no se supera el voltaje «de control» de 1Vp-p, es como el de cualquier amplificador de audio. Su ganancia es constante y tiene una respuesta en frecuencia. Cuando se producen señales con niveles que superen el valor máximo tolerable, entonces el amplificador de error estará dando, constantemente, órdenes para bajar la ganancia y tratar de obtener un nivel plano a la salida. Visto así el sistema se comporta como un sistema de ganancia variable en el cual, esta es una función del nivel de entrada. Despreciando el transitorio se puede expresar la ganancia total del sistema como:
Donde v es el nivel de entrada expresado en Voltios pico a pico. Se aprecia que la ganancia es la inversa del nivel de entrada teniendo como máximo valor a la unidad. El mínimo valor, lo que constituye el factor de atenuación, no está definido en la fórmula que asume que el sistema podrá atenuar infinitamente, lo cual no es cierto, por lo tanto debe considerarse el factor de atenuación máximo o lo que es lo mismo a la ganancia mínima, que procede del rango dinámico de entrada. Si consideramos que es 8Vp-p, entonces la ganancia mínima será 1/8 por lo tanto la fórmula queda:
 Que proporciona un intervalo de ganancias, limitada por un lado por la característica de la configuración del CAG y por el otro por las limitaciones físicas de los componentes.
Que proporciona un intervalo de ganancias, limitada por un lado por la característica de la configuración del CAG y por el otro por las limitaciones físicas de los componentes.
Otro parámetro que se debe considerar es el tiempo de restablecimiento que es muy parecido al tiempo de retardo, pero que es mucho más grande. No voy a hacer los cálculos aquí, pero es fácil notar que depende de la misma red de retardo, R57, C31 y el umbral de Q7. R57 sirve precisamente para asegurar la descarga de C32 cuando el diodo D9 no está conduciendo. R59 es la resistencia que asegura la polarización de la entrada de control del AN5262 cuando Q7 está en corte.
El efecto del CAG no es estrictamente el de un limitador, porque como existe un tiempo de respuesta, existirán picos cortos a la salida que superan el nivel máximo, hasta que el circuito recupere el control.
Una aplicación del CAG
Este control automático de ganancia ha sido probado e incluido en un diseño comercial, y reproduzco aquí el esquema del bloque completo, que aunque incluye algunas variaciones, mantiene el diseño básico aquí mostrado:
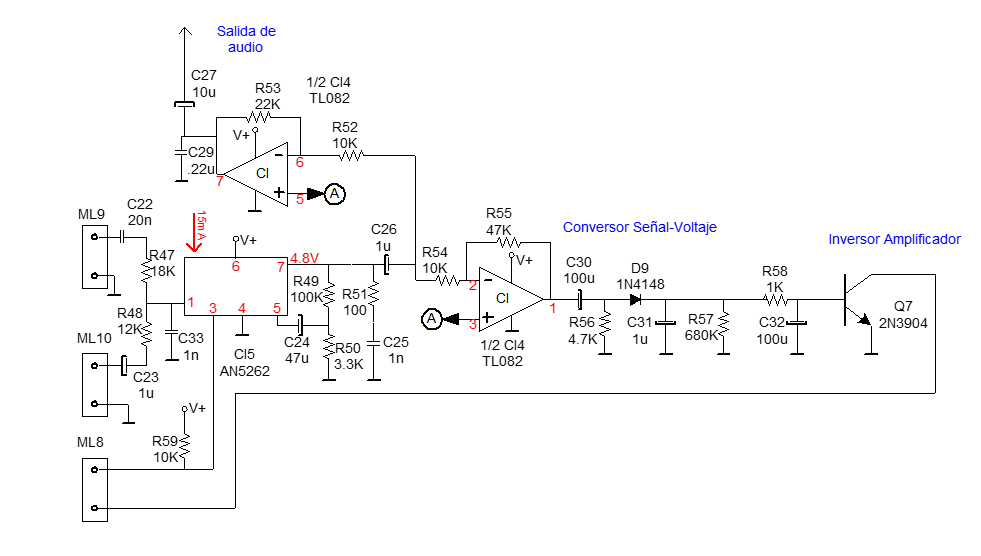
Este diagrama incluye dos entradas de audio (ML9 y ML10) y una entrada de activación del CAG (ML8). La alimentación está en 12.7V.
Una diferencia de este diseño, con el descrito inicialmente, está en que se ha ampliado el rango dinámico de la entrada y se tiene mayor sensibilidad a las señales débiles de audio (umbral de activación por debajo de 1Vp-p).
Para aumentar el rango dinámico de entrada se aumentó el valor de R47 para aumentar el factor de atenuación, por cálculos para 10Vp-p se halló 18K. Sin embargo al aumentar R47 también se aumenta el voltaje a partir del cual empieza la limitación es decir se introduce un factor de atenuación, lo que va en contra de la segunda condición que se requiere cumplir (bajar el umbral de activación). Para compensar este factor se aumentó la ganancia máxima por un factor de 3 disminuyendo R50 en 1/3 de su valor original con lo que se debería tener una ganancia máxima total de 3/factor de atenuación =2.4 que es bastante cercano al valor hallado experimentalmente, con lo que se puede inferir que la ganancia del AN5262 sigue bastante bien la fórmula R50/R51 para la configuración que usamos.
Experimentalmente se ha hallado que el rango dinámico es en realidad de 12Vp-p lo que da un factor de seguridad para casos como variaciones en los valores de alimentación y el voltaje mínimo para que empiece la atenuación esta en aprox. 0.4 Vp-p.
La entrada de audio auxiliar (ML10) tiene un comportamiento que dependerá de si se usa o no la entrada principal, en cuyo caso R47 se comportará como una carga en paralelo. Si solo se usa la entrada auxiliar el rango dinámico de entrada está en algo menos de 10Vp-p y el voltaje mínimo para que empiece la atenuación está bastante cercano a 0.5Vp-p.
El control de desactivación de CAG es sólo un interruptor que rompe el lazo de realimentación con lo que el amplificador estará trabajando siempre con su ganancia máxima.
El ruido de AN5262 no es demasiado alto, aunque no se ha medido el valor, pero se puede intuir que en su mayoría debe ser de origen térmico, debido al calentamiento observado. Otro de los detalles a considerar es que C24 y todos los elementos que se encuentren en el lazo de realimentación son bastante sensibles. Es necesario disminuir la posibilidad de ruido siguiendo los métodos ya conocidos de diseño de pistas y montaje, para evitar ruido.
[1] El rango dinámico de entrada del AN5262 y la impedancia de entrada se explican la parte 1 de este artículo.
[2] Como la corriente necesaria para que conduzca el transistor es bastante baja ya que R59 es de 10K, entonces se puede considerar como 0.6V y no 0.7V el voltaje a partir del cual el transistor se activa.
[3] Para un cálculo más preciso debería considerarse, ya que puede no ser tan despreciable.
[4] Un caso crítico es cuando se conectan dos sistemas de control de ganancia en serie con tiempos de respuesta parecidos. Ambos detectarán el nivel alto en el transitorio pero sólo se requiere la atenuación de uno de ellos para mantener el nivel, la atenuación total será la de los dos que es excesiva y podría producirse una zona de silencio después de un pico de amplitud.
![]() ¿Cómo citar este artículo?
¿Cómo citar este artículo?
- En APA: Hinostroza, T. (2 de abril de 2018). Diseño de un Control Automático de Ganancia – Parte 2. Blog de Tito. https://blogdetito.com/2018/04/02/diseno-de-un-control-automatico-de-ganancia-parte-2/
- En IEEE: T. Hinostroza. (2018, abril 2). Diseño de un Control Automático de Ganancia – Parte 2. Blog de Tito. [Online]. Available: https://blogdetito.com/2018/04/02/diseno-de-un-control-automatico-de-ganancia-parte-2/
- En ICONTEC: HINOSTROZA, Tito. Diseño de un Control Automático de Ganancia – Parte 2 [blog]. Blog de Tito. Lima Perú. 2 de abril de 2018. Disponible en: https://blogdetito.com/2018/04/02/diseno-de-un-control-automatico-de-ganancia-parte-2/
Saludos , excelente diseño . Una pregunta . Se podrá hacer el mismo diseño en estéreo pero con un solo integrado ? .es decir en vez del an 5262 otro .
Hola. Claro que se podría implementar en estéreo, teniendo cuidado de usar el CI adecuado y dotarle de las señales apropiadas de control.